
Sample Geometries (Declustering Objects)
The features described in this topic are only available if you have the Leapfrog Edge extension.
The declustering object is a tool for calculating local sample density. It can be used to provide confidence in an estimate, a value for determining boundaries, or a declustering weight that can be used to remove sampling bias from a set of values. Common traditional techniques for declustering utilise a grid or polygonal cells.
In Leapfrog Geo, the declustering object is used to calculate declustering weights that are inversely proportional to the data density at each sample point. A declustering object can be used by an inverse distance estimator.
The rest of this topic describes the declustering object. It is divided into:
- Creating a New Declustering Object
- The Declustering Object in the Project Tree
- Applying a Declustering Object
- Upgrading Declustering Objects
Creating a New Declustering Object
To create a new declustering object, right-click on the Sample Geometry folder for a domained estimation and select New Declustering Object. The New Declustering Object window will appear and an ellipsoid will be added to the scene.
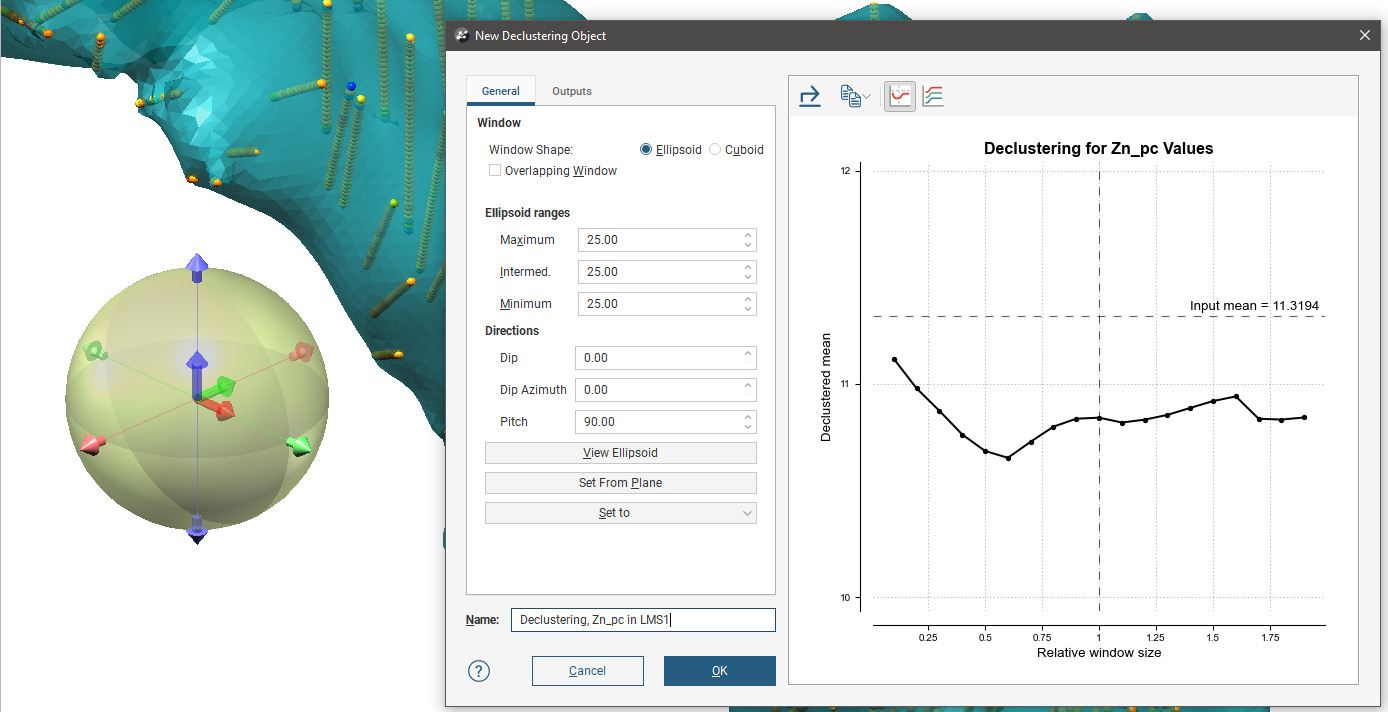
The ellipsoid assists in visualising the declustering window dimensions and direction. It is used for both the EllipsoidWindow Shape and the CuboidWindow Shape. For more information on how to work with the ellipsoid, see The Ellipsoid Widget. If the ellipsoid is removed from the scene it may be restored by clicking the View Ellipsoid button.
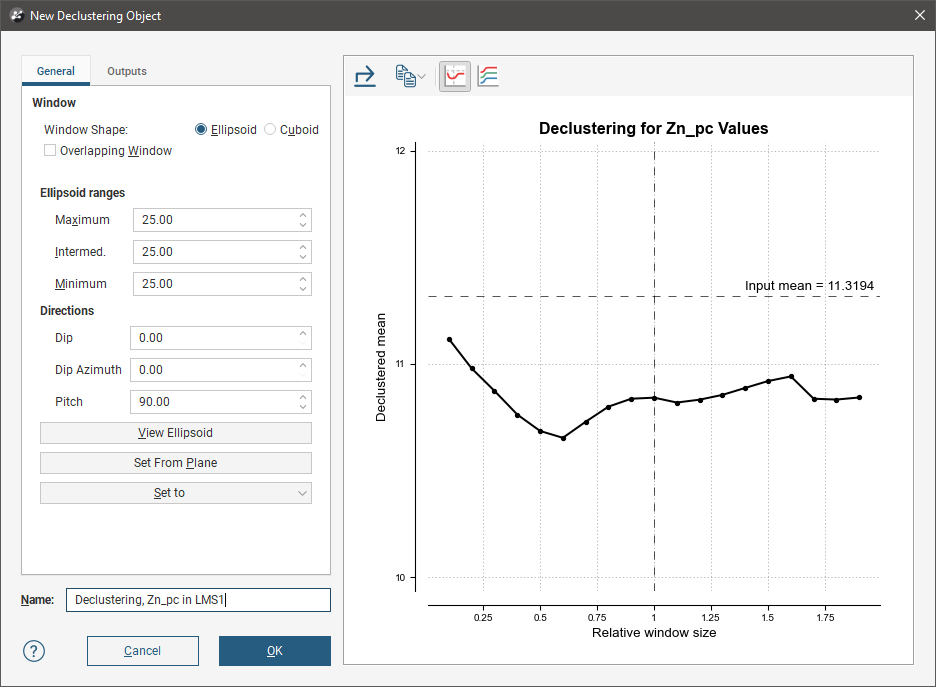
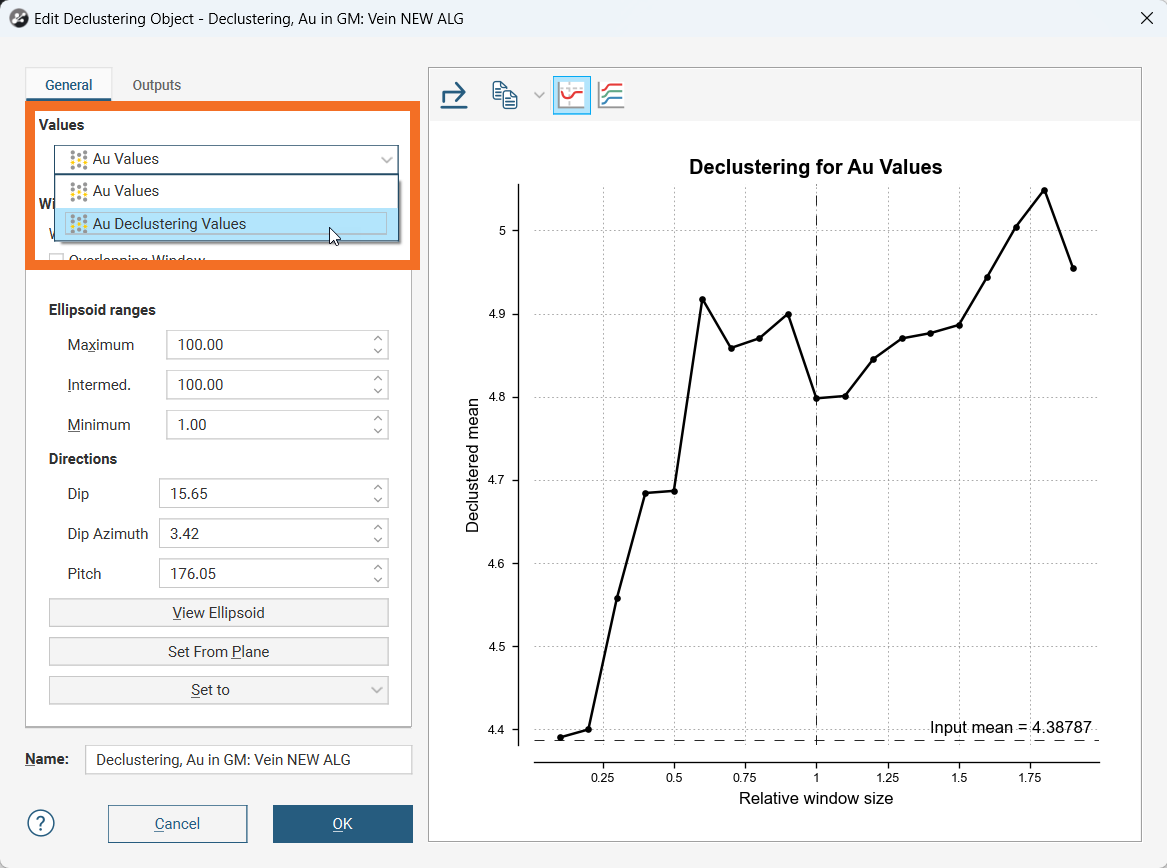
On the right side of the New Declustering Object window is a declustering chart. This is used to guide the selection of settings for the declustering object, particularly the ranges for the search ellipsoid. There are two chart views. The default ratio view, with the Ratio button (![]() ) selected, shows a chart of the declustered mean against relative window size:
) selected, shows a chart of the declustered mean against relative window size:
The range view, with the Range button (![]() ) selected, shows three declustering charts, one for each axis of the search ellipsoid:
) selected, shows three declustering charts, one for each axis of the search ellipsoid:
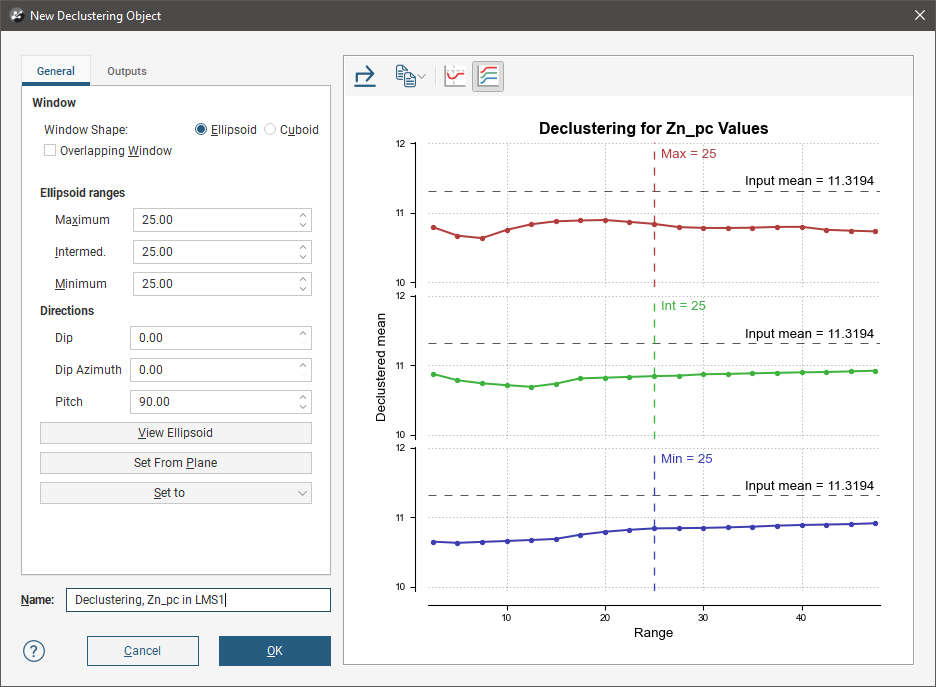
All charts indicate the naïve mean using a dotted horizontal line.
You can interact with the charts by dragging the dotted vertical line to the left or right. In the ratio view, this changes the current ellipsoid range settings by a proportional ratio, as indicated on the x-axis of the chart. In the range view, the selected range setting is updated accordingly. Select a place on the chart that minimises the effect of declustering on the mean of the data, where the range is close to the naïve mean and where there is no significant jump in the data.
Changes made to the declustering options are reflected automatically in the selected chart.
Above the chart are some export options. The Export button (![]() ) saves the declustering chart as either a PDF, SVG or PNG file based on your selection. The Copy button (
) saves the declustering chart as either a PDF, SVG or PNG file based on your selection. The Copy button (![]() ) opens a menu with the option to Copy Graph Image to save an image to the operating system clipboard at the selected resolution. The three resolution options also appear in this menu. You can then paste the image into another application.
) opens a menu with the option to Copy Graph Image to save an image to the operating system clipboard at the selected resolution. The three resolution options also appear in this menu. You can then paste the image into another application.
General Settings
The General tab of the New Declustering Object window is divided into three parts, Window, Ellipsoid Ranges and Directions.
The Window section defines the declustering object’s shape:
- The Window Shape can be Ellipsoid or Cuboid. Select Cuboid to approximate traditional grid declustering. The Ellipsoid option avoids increased density values for sampling oriented away from axes.
- The Overlapping Window option acts similarly to a rolling average by moving the window incrementally in overlapping steps, providing a much smoother result.
- Disabling Overlapping Window approximates a traditional grid behaviour; a single fixed window is used around each evaluation location and the density is simply the count of all input points within the window.
- Enabling Overlapping Window implicitly averages the point count over all possible windows that contain the evaluation location.
The Ellipsoid Ranges settings provide the same anisotropy controls used elsewhere in Leapfrog Geo, determining the relative shape and strength of the ellipsoid in the scene. Including them here provides additional advantages over traditional grid declustering.
- The Maximum value is the range in the direction of the major axis of the ellipsoid.
- The Intermediate value is the range in the direction of the semi-major axis of the ellipsoid.
- The Minimum value is the range in the direction of the minor axis of the ellipsoid.
The Directions settings determine the orientation of the ellipsoid in the scene, where:
- Dip and Dip Azimuth set the orientation of the plane for the major and semi-major axes of the ellipsoid. Dip is the angle off the horizontal of the plane, and Dip Azimuth is the compass direction of the dip.
- Pitch is the angle of the ellipsoid’s major axis on the plane defined by the Dip and Dip Azimuth. When Pitch is 0, the major axis is perpendicular to the Dip Azimuth. As Pitch increases, the major axis points further down the plane towards the Dip Azimuth.
The moving plane can also be useful in setting the anisotropy Directions. Add the moving plane to the scene, and adjust it using its controls. Then click the Set From Plane button to populate the Dip, Dip Azimuth and Pitch settings.
You can also use the Set to list to choose different from the variogram models available in the project.
To approximate grid declustering, set the Window Shape to Cuboid, disable the Moving Window and set the Maximum, Intermed. and Minimum ranges to be equal values.
Outputs
The Outputs tab of the New Declustering Object window features Attributes to calculate. Value and Status will always be calculated, but you can optionally include NS (number of samples), MinD (distance to closest sample) or AvgD (average distance to sample).
The Declustering Object in the Project Tree
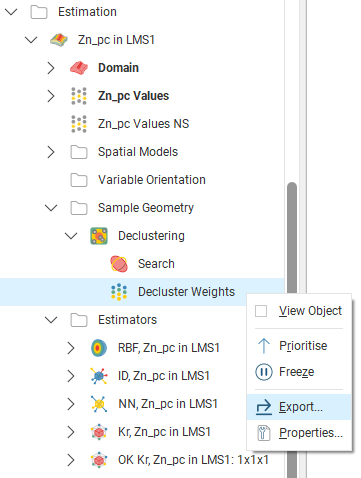
Enter a name for the declustering object and click OK to create it. It will be added to the project tree in the Sample Geometry folder. Expand it to see its parts, which can be individually added to the scene:
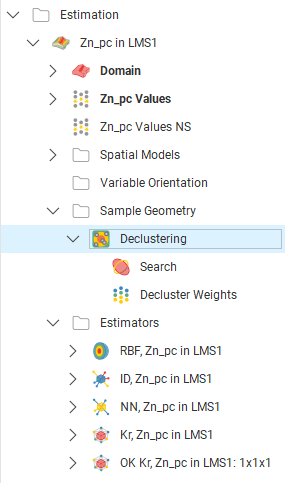
Double-click on the declustering object in the tree to edit it.
Declustering weights will be exported along with other values; right-click on the values object (![]() ) for the domained estimation in the project tree and selecting Export.
) for the domained estimation in the project tree and selecting Export.
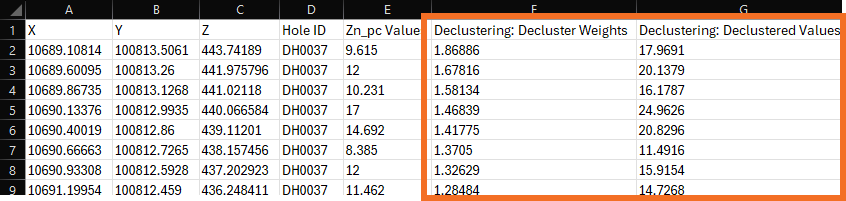
The exported values data will contain the declustered values and declustering weights:
Applying a Declustering Object
Leapfrog Geo supports declustering in the inverse distance estimator. To decluster data, select a declustering object from the Declustering dropdown list:
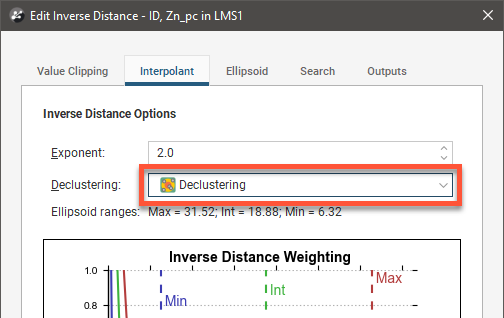
When no declustering object is selected, the inverse distance estimator is the standard inverse distance weighted method.
Upgrading Declustering Objects
An improved declustering algorithm has been introduced in Leapfrog Geo 2024.1. Declustering objects created in earlier versions of Leapfrog Geo will not be upgraded when a project is opened in Leapfrog Geo 2024.1. You may wish to upgrade any older declustering objects, once you have considered the possible effects on other objects in the project. Steps for upgrading declustering objects are described later in this topic.
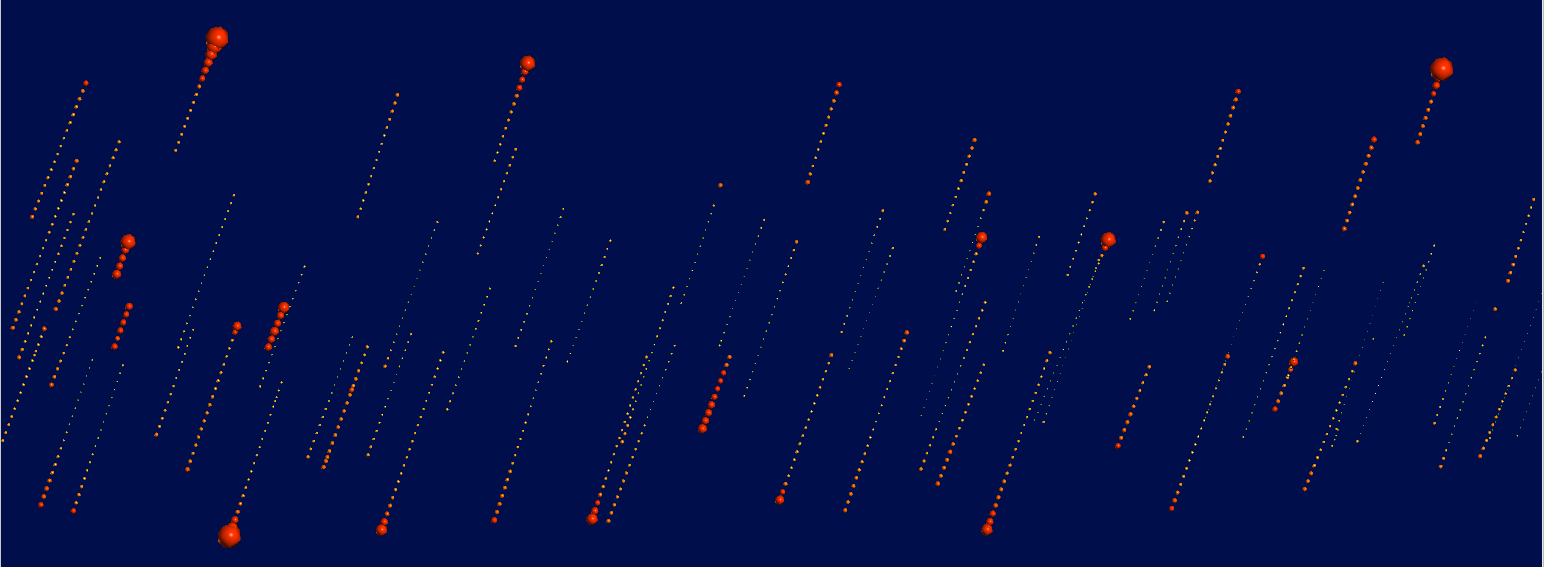
The declustering algorithm introduced in Leapfrog Geo 2024.1 reduces edge effects at the boundaries of the domain. Previously, drilling data beyond the domain was not used when calculating declustering weights, and due to the fewer available samples near the domain boundary, declustering weights would be emphasised at these edges. In the scene below, declustering weights are shown, with the points scaled to the value of the weight of the point. Note that some of the calculated weights swell at the top and bottom of the lines of points, near the domain boundary:
The new algorithm uses samples beyond the domain boundary to a buffer distance of twice the average drillhole spacing. When created from points, 10% of the maximum extent of the axis-oriented bounding box is used as the buffer distance. These values beyond the domain are not employed in subsequent estimations, but when considered for the purposes of calculating declustering weights, results in reducing bias at the boundary of the domain:
When the domained estimator uses values composited Within boundary, only for the purpose of the declustering weights calculation, the drillhole will be composited within the boundary plus the buffer distance of twice the average drillhole spacing.
The edge effect bias of the previous algorithm has led to it being deprecated. New declustering objects cannot be created using the previous algorithm, only the new algorithm will be used.
However, so that existing estimators are not recalculated to produce new values, projects that already have declustering objects will not be forced to upgrade to the new algorithm. Still, the advantages of the new algorithm in producing better and more correct estimates do recommend the option to upgrade.
When considering upgrading estimators to use the new algorithm, follow these steps:
1. Copy the domained estimation and rename the copy to differentiate it from the original and to indicate that it will use the new algorithm. This ensures that the existing declustering object is preserved as there is no way to revert to the prior algorithm once the new one is selected.
2. Open the declustering object for the domained estimation that will use the new algorithm.
3. For the Values field, select the option that includes Declustering Values.
4. Evaluate IDW estimators that use both the old and new algorithms onto a block model.
You could also use the Calculations functionality to difference the two evaluations to study and analyse the effect of the new algorithm to inform decisions about which declustering object the project will be using for modelling in the future.