
Kriging Theory
Kriging is a statistical local estimation technique that provides the best linear unbiased estimate of an unknown characteristic being studied.
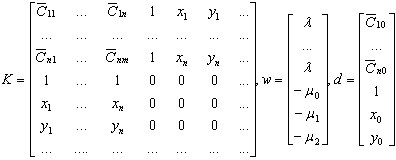
Oasis montaj supports ordinary Kriging as well as universal Kriging. Universal kriging differs from ordinary kriging in that it enables the data to contain a regional trend. For a more in-depth understanding of the geostatistical analysis and kriging refer to Journel and Huijbregts [1].
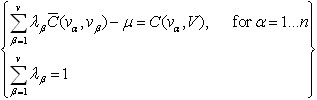
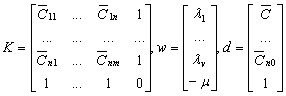
Ordinary Kriging
References:
- [1] C. A.G. Journel and Ch.J. Huijbregts, Mining Geostatistics (London: Academic Press, 1978).
See Also:
Got a question? Visit the Seequent forums or Seequent support
© 2023 Seequent, The Bentley Subsurface Company
Privacy | Terms of Use